【转载请注明出处】chenrudan.github.io
8月的时候把David silver的强化学习课上了,但是一直对其中概念如何映射到现实问题中不理解,半个月前突然发现OpenAI提供了一个python库Gym,它创造了强化学习的environment,可以很方便的启动一个强化学习任务来自己实现算法(新智元OpenAI简介[1]),并且提供了不少可以解决的问题来练手https://openai.com/requests-for-research/。本文针对如何解决入门问题CartPole,来解释一下怎么将之前课上的算法转化成实现代码。这里强烈推荐一下官网的教程http://kvfrans.com/simple-algoritms-for-solving-cartpole/,因为这个作者只是个高中生T^T…
建了一个强化学习讨论qq群,有兴趣的可以加一下群号595176373或者扫描下面的二维码。

1. Gym库
它提供了一些函数接口,模拟了强化学习问题中environment,当向它传递一个动作,它相应会返回执行这个动作后的状态、奖赏等。
1 | #启动某种环境 |
执行pip install gym即可安装,https://gym.openai.com/docs中有实例,复制代码运行即可检查是否安装成功。此外提供了env.monitor来记录下算法执行过程,它会保存为.mp4文件,然后上传到OpenAI网站上可以检查执行效率,上传可以通过执行代码中加入api_key(鉴别用户),我是直接把api_key写入了~/.bashrc文件中即”export OPENAI_GYM_API_KEY=”。
2. CartPole问题
CartPole的玩法如下动图所示,目标就是保持一根杆一直竖直朝上,杆由于重力原因会一直倾斜,当杆倾斜到一定程度就会倒下,此时需要朝左或者右移动杆保证它不会倒下来。我们执行一个动作,动作取值为0或1,代表向左或向右移动,返回的observation是一个四维向量,reward值一直是1,当杆倒下时done的取值为False,其他为True,info是调试信息打印为空具体使用暂时不清楚。如果杆竖直向上的时间越长,得到reward的次数就越多。
1 | #从动作空间中采样一个动作 |
结果是[-0.061586 -0.75893141 0.05793238 1.15547541]。
3. 三种解法
目的是在不同状态下执行出合适的action,代码中要做的就是替换掉采样这一行,用policy来决定执行什么动作。也就是说此处需要决定policy的形式,官网给出了两种思路,已知policy的输入是当前所处的状态observation,输出是action的取值即0 or 1,observation是一个四维向量,如果对这个向量求它的加权和,就可以得到一个值,那么就可以根据加权和的符号来决定action,同样可以用sigmoid函数当成二分类问题。基于这两种policy可以得到下面三种解法,核心就在于通过改变加权的权重值就能改变policy。
3.1 Random Guessing Algorithm & Hill Climbing Algorithm
由于policy中权重也是一个四维向量,如果随机给四维向量赋值,有机会得到比较好的policy。首先先实现一个函数用来衡量给定的某组权重效果如何,函数返回值是这组权重下得到的奖赏,意义是杆维持了多长时间未倒下,代码如下。
1 | def evaluate_given_parameter_by_sign(env, weight): |
然后要改变权重,这里试验了两种方法,一种是random guess,即随机给四维权重weight赋值,一种是hill climbing,即给当前最好的权重加上一组随机值,如果加上这组值持续时间变长了那么就更新最好的权重,如果没有变的更好就不更新。
1 | def random_guess(): |
3.2 Policy Gradient
上面的两种方法都是在随机的改变权重,针对这种参数非常少的情况确实能得到不错的效果,但是一旦参数数目增多,这种方式耗时非常大,一点也不实用。而第七课[2]讲解了两种Policy Gradient的方法,分别是Monte-Carlo Policy Gradient和Actor-Critic Policy Gradient。我们知道衡量policy好坏有三种方法,一是在某个状态下和该policy作用下能获得的值函数值,一是该policy作用下能获得的所有状态的期望值函数,一是在该policy作用下能获得的所有状态的期望immdiate reward,并且推导出了这三种方法的统一导数形式,即衡量policy的目标函数导数为$\bigtriangledown _{\theta}J(\theta) = E_{\pi_{\theta}}[\bigtriangledown _{\theta}log\pi_{\theta}(s,a)Q^{\pi_{\theta}(s,a)}]$,这个式子也就是policy gradient。
根据题目的意思,此处的policy换成逻辑回归,即$\pi_{\theta}(s,a) = \frac{1}{1 + e^{-wx}}$那么式子中$\bigtriangledown _{\theta}log\pi_{\theta}(s,a) = (1-pi)*(-x)$。在第一种方法中用直接用immdiate reward代替$Q{\pi_{\theta}(s,a)}$,所以在本例中就是直接取1。
首先定义一下选择action的函数,也就是利用sigmoid函数进行二分类。
1 | def choose_action(weight, observation): |
由于Monte-Carlo方法中需要先基于某组参数算出一个episode,再基于这个episode来更新policy的参数,所以需要实现一个函数产生一个episode。
1 | def generate_episode(env, weight): |
从而可以实现第七课中Monte-Carlo的更新方法。
1 | def monte_carlo_policy_gradient(env): |
而针对Actor critic的方法,则是把值函数$Q{\pi_{\theta}(s,a)}$也当成observation的含参函数,且直接把observation的加权和当成值函数的取值,那么也就能由第七课的更新公式来同时更新值函数和policy的参数。代码如下:
1 | def actor_critic_policy_gradient(env): |
4.提交到OpenAI
上面的代码实现以后,就能够提交到OpenAI的网站上去评估效果如何,首先加上两行代码,变成下面的样子。
1 | env = gym.make('CartPole-v0') |
这会将训练过程记录下来生成.mp4文件,如果像我这样将api_key写入~/.bashrc,就可以直接执行下面代码提交给OpenAI。
1 | gym.upload('cartpole-hill') |
最后在网站上就能看到如下的结果。
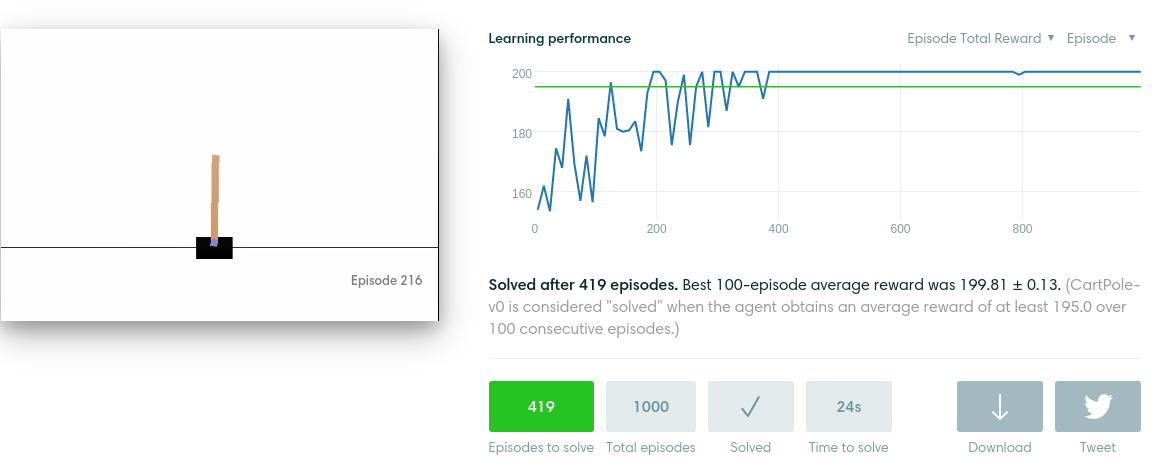
5.小结
我的policy gradient是完全按照第七课的内容实现的,但是实际上效果还不够好,并且非常依赖初始值,初始值好就很快收敛,不好就会一直恶性循环。总之感觉这个网站还是很有意思的,值得去玩一玩,文中的代码在这里。